Program Editor
Launching Program Editor
Click on the "E" shortcut on the computer desktop to launch the Program Editor.Program Editor can be also launched from the computer folder. On the Robot computer ( Raspberry PI ) from: home/pi/lnt/e.jar On a Windows PC from: c:/lnt/e.jar When launched the software will display the application window.
Opening and Browsing a Program
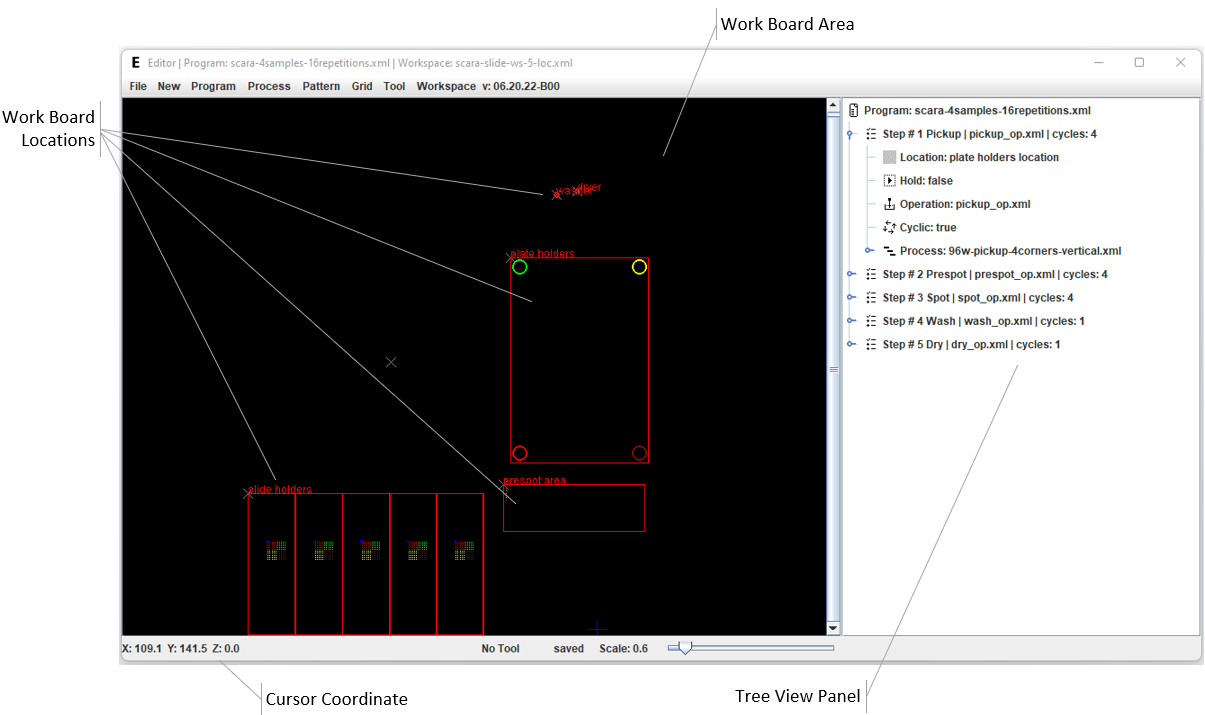
Use Programs > Open menu item to open an existing program. The program will be displayed in the Work Board Area and the Tree View Panel.Example Program
The example program used in this manual performs the following Steps 1. Picks up a sample located in the corner wells of a 96-well plate (4 samples in total). 2. Performs prespotting on a dedicated substrate( 2 spots per each sample ). 3. Prints array of 25 repetitions for each of the 4 samples in 5x5 pattern. 4. Performs pin washing operation. 5. Performs pin drying operation NOTE:Each sample and each spot printed with this particular sample is marked with a dedicated color.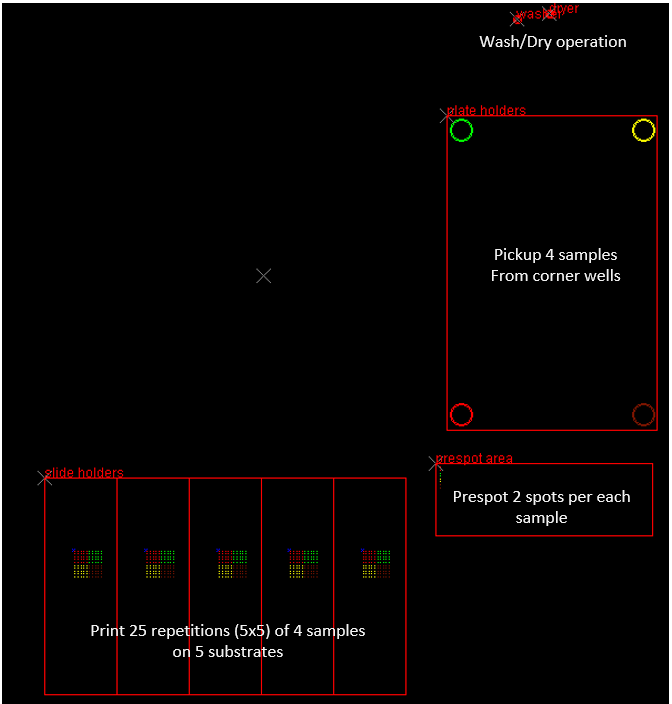
Work Board Area
The work Board Area provides graphical representation of the program spots the arrayer will visit when the program is executed. The points are placed in the corresponding Work Board Locations. SInce the program consists of 5 steps the work board has 5 Locations: 1. Plate holder 2. Slide holders 3. Prespot area 4. Washer 5. Dryer NOTE: Work Board Locations are added and edited in the Robot Control module.The points in each location are colored. Points of each color are visited during the same Program Cycle. Work Board view can be resized dragging the "Scale" slider. Work Board View does not allow any editing operations with the opened program. It also does not show the sequence in which the program is executed. NOTE: Work Board locations and there exact positions are defined in the Robot Controls Module. There can be different work board configurations loaded to the Work Board view ( Work Board > Load menu item ). If a new work board configuration is loaded, the points will be repositioned to the new locations.
Tree View
Program Tree View shows sequence of the program execution and allows editing program components. Program consists of Steps and Cycles.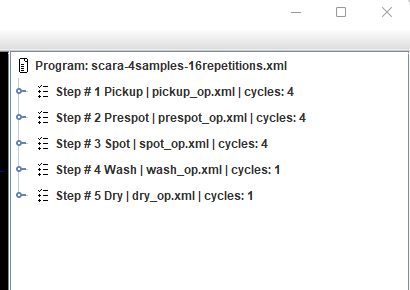
Program Steps
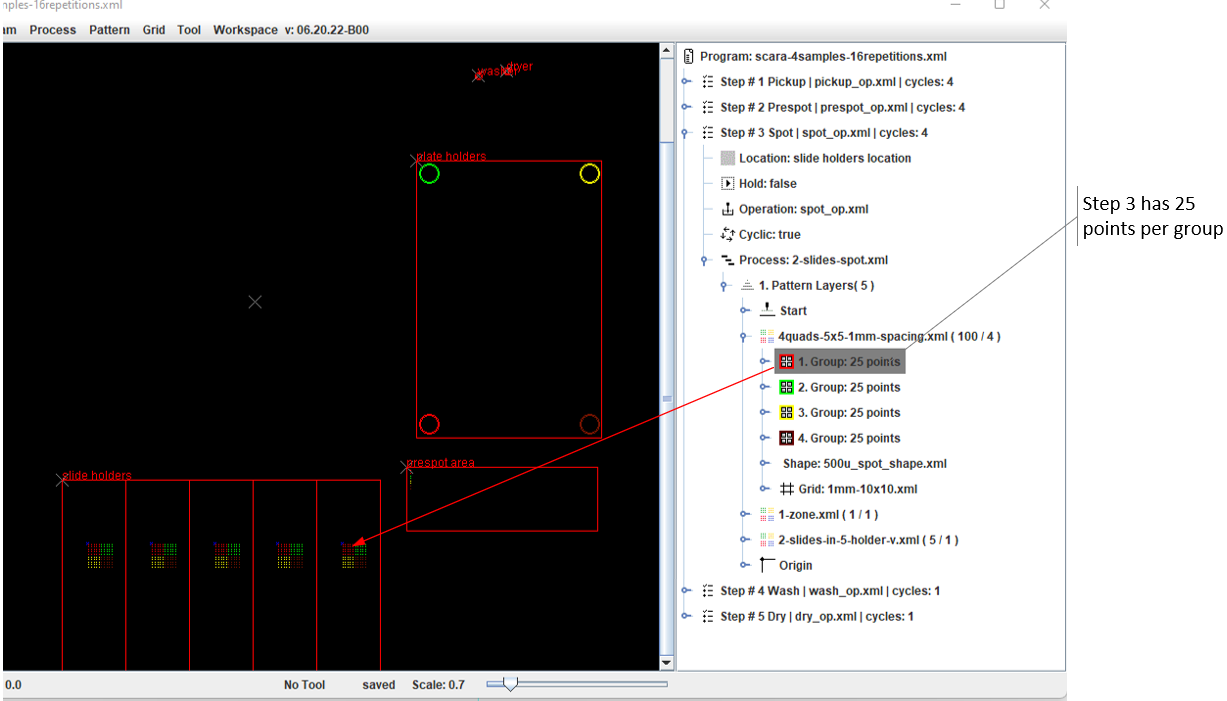
For each sample in the program the arrayer performs a series of consecutive steps. Pickup > Prespot > Print > Wash > Dry Each step is performed within a specific Work Board Location. For example Pickip step is done within the "Plate Holders" location. NOTE: If the Location coordinates are shifted, so the all points of the corresponding step will be shifted to the same distance. This way a program can be executed on different arrayers without modifications. At each step the arrayer visits certain number of points. In the Puck-up step, for example, only one point is visited during each step ( corresponds to the well of the microplate ). In the Print step 125 points are visited ( correspond to the 5x5 repetitions on the 5 slides ). When the arrayer visits all point in a particular step it moves to the next step ( and to the next Work Board Location ). NOTE:Points visited during a Step are always combined in Groups. Therefore a group can have a single point ( such as single visit of the plate well ) or a group can consist of multiple points ( repetitions on the microarray ). Typically each program step should contain the same number of groups.Program Cycles
Moving through all program steps constitutes a Cycle. There are as many cycles in the program as the number of samples has to be printed. When one cycle is completed the arrayer moves to the next and repeats all steps with the new sample. The groups are marked with a unique color in every step. Points of the same color are visited during the same program cycle. For example all points marked with Red color are visited within the first print cycle. All of them are marked with Red in all of the program Steps. Step #1 has one point in each of the for groups, which corresponds to the pickups of the 4 samples.Step #3 "Spot" has 25 points in each of the four groups which corresponds to printing 25 repetitions ( 5x5 ) of each of the four samples.
Running the Program
The program can be launched from the Robot Control module.